



中国科学技术大学成功研发出具有19自由度仿生灵巧手,标志着智能机械领域迈出了重要一步。这一创新成果将开启智能机械新时代,为机器人技术带来革命性变革。该灵巧手的设计灵感来源于人类手部,具备高度灵活性和仿真能力,未来将在智能机器人等领域发挥重要作用。
目录导读:
随着科技的飞速发展,人工智能和机器人技术日益成为研究热点,在诸多领域中,仿生灵巧手的研究对于提高机器人的操作能力和适应性具有重要意义,中国科学技术大学(中国科大)宣布成功研发出19自由度仿生灵巧手,这一创新成果引起了广泛关注,本文将详细介绍这一研发背景、技术特点及其对未来发展的影响。
研发背景
随着机器人技术的不断进步,仿生灵巧手作为机器人末端执行器的重要组成部分,其性能直接影响到机器人的工作效能,传统的仿生灵巧手在灵活性、精确性和适应性等方面存在诸多挑战,为了提高机器人的操作能力和适应性,研究人员一直在寻求突破,中国科大此次成功研发的19自由度仿生灵巧手,为解决这一问题提供了全新的解决方案。
技术特点
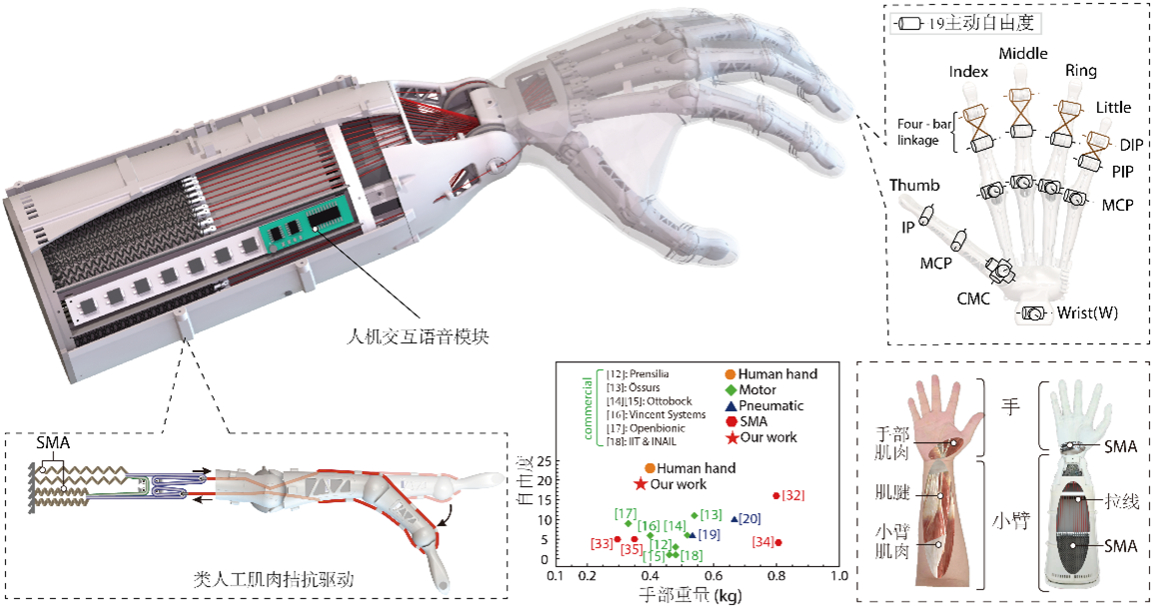
1、高自由度:中国科大研发的仿生灵巧手具备19个自由度,使得手部能够完成更加精细、复杂的动作,如抓取、操作各种形状和尺寸的物体。
2、仿生设计:该灵巧手采用仿生设计,模拟人类手部关节结构和运动方式,提高了手部运动的灵活性和协调性。
3、强大功能:仿生灵巧手具备高度智能,能够适应各种环境,完成多样化任务,它还具有高度可编程性和可扩展性,方便用户根据实际需求进行定制。
4、广泛应用:由于仿生灵巧手的高精度和高适应性,它将在工业、医疗、航空航天、农业等领域发挥重要作用。
研发过程
中国科大研发团队经过数年努力,攻克了多项技术难题,成功研发出19自由度仿生灵巧手,在研发过程中,团队面临了诸多挑战,如设计优化、材料选择、控制系统开发等,通过不断试验和改进,团队最终攻克了这些难题,实现了仿生灵巧手的高性能。
成果影响
1、提高机器人技术水平:中国科大成功研发19自由度仿生灵巧手,将有助于提高机器人技术的整体水平,这一创新成果将为机器人技术在各个领域的应用提供有力支持。

2、推动产业发展:仿生灵巧手的应用将推动相关产业的发展,如工业机器人、医疗机器人、航空航天等领域,这将为相关产业带来更大的经济效益和社会效益。
3、拓展机器人应用领域:由于仿生灵巧手的高精度和高适应性,它将使机器人在更多领域得到应用,如灾害救援、深海探索、空间探测等,这将为人类社会带来更多的便利和发展机遇。
4、提升国际竞争力:中国科大在仿生灵巧手研发领域的突破,将提升中国在机器人技术领域的国际竞争力,这将有助于中国在全球科技舞台上占据更重要地位。
5、挑战与机遇并存:随着仿生灵巧手的研发成功,如何将其推广应用、实现产业化将成为未来的挑战,这也将带来诸多机遇,推动相关领域的技术进步和创新发展。
未来展望
中国科大成功研发19自由度仿生灵巧手,标志着我国在机器人技术领域取得了重要突破,随着技术的不断进步和应用的推广,仿生灵巧手将在更多领域发挥重要作用,我们将持续关注这一领域的最新进展,期待仿生灵巧手在未来为人类社会带来更多的便利和发展机遇。
本文介绍了中国科大成功研发19自由度仿生灵巧手的相关内容,我们简要介绍了研发背景和技术特点,详细描述了研发过程和成果影响,我们对未来展望进行总结,期待仿生灵巧手在未来为人类社会带来更多的便利和发展机遇,这一创新成果将有助于提高机器人技术的整体水平,推动相关产业的发展,拓展机器人在各个领域的应用。
转载请注明来自沿途技术网,本文标题:《中国科大成功研发19自由度仿生灵巧手——开启智能机械新时代》





 京公网安备11000000000001号
京公网安备11000000000001号 京ICP备11000001号
京ICP备11000001号